
Syllabus 2021 and Class board – any public or private questions are welcome.
Contents
- Introduction
- Basic concepts
- Selected topics
- Interesting reading articles
- Homework #1
- Homework #2
- Homework #3
- Homework #4
- Homework #5
Brief Introduction
Geometry and Topology provide distinct perspectives of the same thing. On the one hand, Geometry provides a quantitative perspective on spaces, i.e., we measure lengths, areas, volumes, or curvatures, etc. to study spaces. On the other hand, Topology provides a qualitative perspective on spaces, i.e., we study the properties of spaces that are invariant under continuous deformation such as connectivity, continuity, etc.
In the field of Topology, there are subfields such as general topology, differential topology, algebraic topology. General topology is the most fundamental, which we cover in this course. Differential topology and algebraic topology use differential and algebraic structures in the study of spaces as the names indicate. There is also surface topology that characterizes all 2 dimensional (orientable or non-orientable) manifolds.
Interestingly, Topology turns out to play a crucial role in data analysis. For example, when we collect data points in a high dimensional space, we would like to determine the connectivity among the points, which is a typical question related to Topology. Indeed, there are quite a few works on the link between topology and data analysis. To name a few, we have the following references:
- G. Carlsson, Topology and data, Bull. AMS, Vol. 46, No. 2, pp.255–308, 2009
- H. Edelsbrunner and J. Harer, Persistent homology: A survey, Surveys on Discrete and Computational Geometry. Twenty Years Later, Contemporary Mathematics, Vol 453, AMS, 2008
- F. Chazal and B. Michel, An introduction to Topological Data Analysis: fundamental and practical aspects for data scientists, arXiv:1710.04019v2, 2021
In this course, we begin discussing the basics of Topology. It is always good to have concrete examples for better understanding of abstract notions, for which students need to work out problems. Towards the end of the semester, I will try to present briefly how topology applies to data science through examples.
Basic Concepts
Definition 1) A topology on a set 

and
- The union of the elements of any subcollection of
- The intersection of the elements of any finite subcollection of
A set
Below is an example of a topology: the collection of all open subsets of 
Example BC1) Knowing that 




Let
1) Remembering that 

2) Let 




To see this, we choose an arbitrary element 








3) Let 





Let 




The same is true for 

Homework #1 – Due on 9/21 Tuesday.
Problem#1) Let 




Problem#2) Let
a) If 
b) If 
Problem#3) Let 


i) 
ii) 


a) Prove that
b) Prove that
Problem#4) Section 2.1: #1, #3, #7, #8
Problem#5) Section 2.2: #1, #2, #4
Homework #2 – Due on 10/11 Monday.
Problem#1) Let 



Problem#2) We consider a product space 







Problem#3) A topological space 


i) Let
ii) Let 
Problem#4) Section 2.3: #9, #12
Problem#5) Section 2.4: #6(c)(d), #8(b)(c)(d)
Homework #3 – Due on 11/14 Sunday.
Problem#1) Prove that connectedness defines an equivalence relation. In other words, if we we define 



Problem#2) Prove that a topological space
Problem#3) Section 2.5: #1, #9(a)(b)(c)(d)(e)
Problem#4) Section 2.6: #2, #6, #7, #8, #10, #11
Homework #4 – Due on 11/28 Sunday.
Problem#1) Section 2.7: #1, #3
Problem#2) Section 2.8: #6, #7, #9, #10, #11, #14
Problem#3) Section 2.9: #4, #7
Problem#4) Section 2.10: #1, #2
Homework #5 – Due on 12/12 Sunday.
Problem#1) Section 2.13: #1(a)(b)(c), #4, #6, #8(a)(c)(d), #9(a)(b)
Problem#2) Find a homeomorphism 

Problem#3) Complete the proof that the homotopy equivalence is an equivalence relation on the collection of topological spaces. That is to prove that the relation 
Problem#4) A topological space 
1. Every map 
2. Every map
3. 
Selected Topics
Various types of topologies
Let 
Let 



we may consider the smallest topology
Exercise ST1) Let 


1. The smallest topology 


2. The smallest topology 

Exercise ST2) Let 

1. Let 





2. In linear algebra, there is an important concept of a dual space 




Exercise ST3) As we have seen in Exercise SP2, we may define the weak topology on the vector space 










More will be discussed in class about the weak and the weak-
Manifolds Triangulation
For simplicity, we consider an 



Exercise ST4) Let 

1. Define a topology on
2. Under the chosen topology, write down a homeomorphism 


A triangulation on an
Definition 1) An 

Example 1) A 






where the only nonzero component in 






It will be easier to see this with a tetrahedron, a 



Definition 2) A simplicial complex is an object that one can construct by gluing simplexes together along the faces.
Question 1) Does a manifold admit a triangulation? In other words, is it possible to represent an
Partial answer 1) Every smooth manifold admits a triangulation, which can be confirmed by the following two papers:
1. Stewart S. Cairns, Triangulation of the manifold of class one, Bull. Amer. Math. Soc. 41 (1935), no. 8, 549–552.
2. John Henry C. Whitehead, On 
Delaunay Triangulation
I, myself, have written a simple MATLAB code below to generate uniform points on a sphere 
%
% Delaunay Triangulation on a sphere
%
clear;close all;
min_dist = 0.2; % minimum distance between any two points
xy_pts = 60 ; % number of equidistanced points on [0, 2*pi)
z_pts = 20 ; % number of equidistanced points on (0, pi)
%% Take uniform sample points on the \theta-\phi plane: 0 <= \theat < 2pi, 0< \phi < pi
cnt = 0;
for j1=1:xy_pts
a = 2*pi*(j1-1)/xy_pts;
for j2=1:z_pts
b = pi*j2/(z_pts+1);
cnt = cnt +1;
X(cnt,1:3) = [sin(b)*cos(a) sin(b)*sin(a) cos(b)];
end
end
X = [0,0,1;X;0,0,-1]; % The north and the south poles are added.
%% We remove points within the specified minimum distance.
for j1=1:cnt+2
for j2=1:cnt+2
if j2~=j1 && norm(X(j1,:)-X(j2,:))< min_dist && norm(X(j1,:))>0
X(j2,:) = [0,0,0];
end
end
end
cnt1=0;
for j1=1:cnt+2
if norm(X(j1,:))>0
cnt1=cnt1+1;
Y(cnt1,1:3) = X(j1,:);
end
end
%% Visualization of the delaunay triangulation
Number_Of_Pts = cnt1; % The total number of points on a sphere
T = delaunayn(Y);
%% Below is to color the tetrahedra.
nT = size(T,1);
C = zeros([nT,1]); % Colormap
for j1=1:nT
j1
C(j1) = 1+floor(10*Y(T(j1,1),3));
end
tetramesh(T,Y,C);
set(gca,'Position',[0.03 0.03 0.95 0.95]);
set(gcf,'Position',[200 200 700 700]);
This code generates the following triangulation.

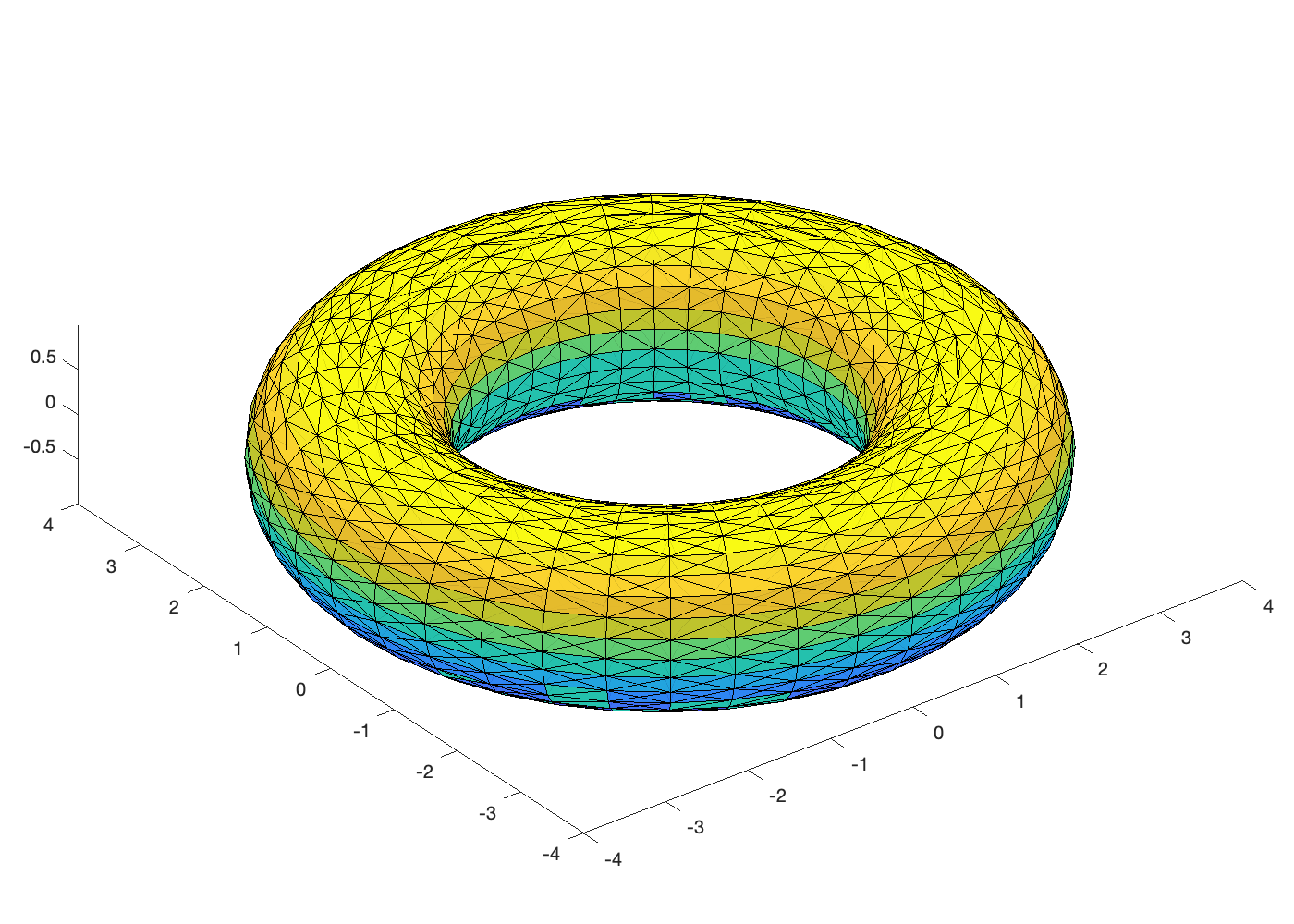
I, myself, have written another simple MATLAB code to generate uniform points on a torus 
%
% Delaunay Triangulation on a torus
%
clear;close all;
min_dist = 0.2; % minimum distance between any two points
xy_pts = 60 ; % number of equidistanced points on [0, 2*pi)
z_pts = 40 ; % number of equidistanced points on (0, 2*pi)
%% Take uniform sample points on the \theta-\phi plane: 0 <= \theat < 2pi, 0< \phi < 2*pi
cnt = 0;
for j1=1:xy_pts
a = 2*pi*(j1-1)/xy_pts;
for j2=1:z_pts
b = 2*pi*(j2-1)/z_pts;
cnt = cnt +1;
X(cnt,1:3) = [-(3+cos(a))*sin(b) (3+cos(a))*cos(b) sin(a)];
end
end
%% We remove points within the specified minimum distance.
for j1=1:cnt
for j2=1:cnt
if j2~=j1 && norm(X(j1,:)-X(j2,:))< min_dist && norm(X(j1,:))>0
X(j2,:) = [0,0,0];
end
end
end
cnt1=0;
for j1=1:cnt
if norm(X(j1,:))>0
cnt1=cnt1+1;
Y(cnt1,1:3) = X(j1,:);
end
end
%% Visualization of the delaunay triangulation
Number_Of_Pts = cnt1; % The total number of points on a sphere
DT = delaunayTriangulation(Y);
Num_DT = size(DT,1);
% Below is to remove unwanted connections between points due to the
% nonconvex shape of the torus
cnt2=0;
for j1=1:Num_DT
coords = DT.ConnectivityList(j1,:);
z = Y(coords(1),:) + Y(coords(2),:) + Y(coords(3),:) + Y(coords(4),:);
z = z/4;
b = 3*z(1:2)/norm(z(1:2));
b = [b,0];
if norm(z-b)<=1
cnt2 = cnt2+1;
TRI0(cnt2,:) = coords;
end
end
TR = triangulation(TRI0, Y(:,1),Y(:,2),Y(:,3));
%% Below is to color the tetrahedra
nT = size(TR,1);
C = zeros([nT,1]); % Colormap
for j1=1:nT
max_TR = max(Y(TR(j1,1),3),Y(TR(j1,2),3));
max_TR = max(max_TR,Y(TR(j1,3),3));
max_TR = max(max_TR,Y(TR(j1,4),3));
C(j1) = 1+floor(10*max_TR);
end
%%
tetramesh(TR,C);
set(gca,'Position',[0.06 0.04 0.9 0.94]);
set(gcf,'Position',[200 200 700 500]);
This code generates the following triangulation.
Exercise ST5) Write your own MATLAB code to generate a delaunay triangulation on the following C shape. Since you can get the shape by cutting the above torus in half and cap the two ends by the half spheres, you can combine the above two codes if you like.


Euler Characteristic
Definition 1) Let 



Example EC1) We can consider the following polyhedra.
- For a regular cube
in 3D,
.
- For a regular tetrahedron
in 3D,
.
- For a regular icosahedron
in 3D,
.
It is interesting to observe that the above mentioned polyhedra can be drawn on the surface of a sphere.
Exercise ST6) Prove that any subdivision of a face or an edge of a polyhedron does not affect the Euler characteristic.
Theorem) The Euler characteristic of a polyhedron depends on the surface on which the polyhedron can be drawn. In other words, if two polyhedra can be drawn on the same surface, then they have the same Euler characteristics.
The above theorem implies that it is not the particular form of a polyhedron, but the surrounding environment that defines the Euler characteristic. The natural question that one may ask is if the Euler characteristic is topologically invariant. In other words, if there are two surfaces 

Exercise ST7) Compute the Euler characteristic of
Example EC2) A Platonic solid is a convex polyhedron where all the faces are congruent regular polygons and the same number of faces meet at every vertex. Regular cubes and regular tetrahedra are examples of Platonic solids. We can prove that only 5 Platonic solids exist.
Let 



That is, the Euler characteristic of

which implies that 





This means that there are only 5 Platonic solids described by the five pairs of
gives rise to the tetrahedron.
gives rise to the cube.
gives rise to the octahedron.
gives rise to the dodecahedron.
gives rise to the icosahedron.
You can see the shapes here.
Interesting Reading Articles
- The proof of Poincaré Conjecture for n=4 provided in 1981 by Michael Freedman is notoriously difficult to understand. A group of researcher have now rewritten it to bring it back to life. Here is the article about it:
https://www.quantamagazine.org/new-math-book-rescues-landmark-topology-proof-20210909/ - An easy article on how mathematicians use Homology to make sense of Topology:
https://www.quantamagazine.org/how-mathematicians-use-homology-to-make-sense-of-topology-20210511/ - A graduate student solved the decades-old Conway knot problem and got a tenure-track position at MIT.
https://www.quantamagazine.org/graduate-student-solves-decades-old-conway-knot-problem-20200519/
